Robot localization in ROS
Published:
Detect the location of the robot with particle filter and ROS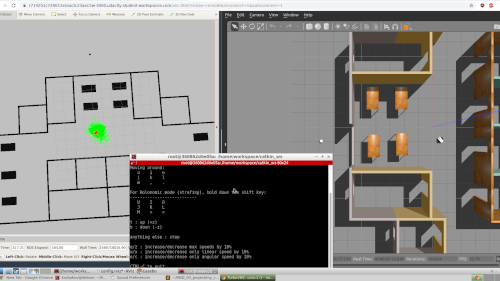

Published:
Detect the location of the robot with particle filter and ROS
Published:
Find the facial keypoints on image with help of CNN
Published:
Detect the dog bread by using CNN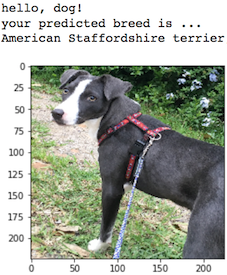
Published:
Use RNN (LSTM) to generate TV scripts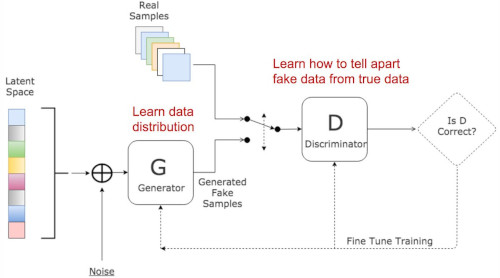
Published:
Build the path from point A to point B avoiding static obsticles in ROS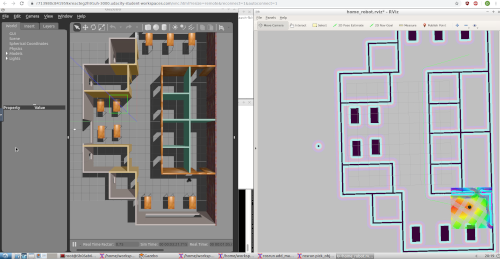
Published:
Generate unexisting portatraits with GANs
Published:
Generate the map of the environment by reading odometry, lidar and camera data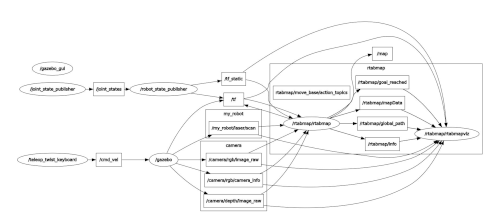
Published in Journal 1, 2009
This paper is about the number 1. The number 2 is left for future work.
Recommended citation: Your Name, You. (2009). "Paper Title Number 1." Journal 1. 1(1). http://academicpages.github.io/files/paper1.pdf
Published in Journal 1, 2010
This paper is about the number 2. The number 3 is left for future work.
Recommended citation: Your Name, You. (2010). "Paper Title Number 2." Journal 1. 1(2). http://academicpages.github.io/files/paper2.pdf
Published in Journal 1, 2015
This paper is about the number 3. The number 4 is left for future work.
Recommended citation: Your Name, You. (2015). "Paper Title Number 3." Journal 1. 1(3). http://academicpages.github.io/files/paper3.pdf
Published:
As part of the AI Summer School organized by University of Amsterdam and TomTom, I provided a workshop on autonomous driving.
Published:
I gave an introduction talk for students that participated in Sumo challenge, the biggest robotic competition in robotics in Poland.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.