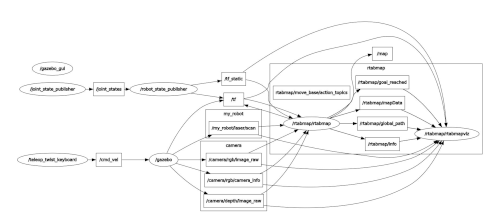
Robot localization in ROS
Published:
Detect the location of the robot with particle filter and ROS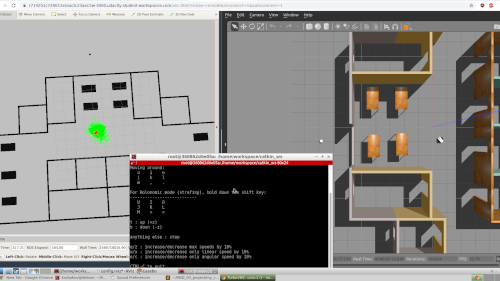

Published:
Detect the location of the robot with particle filter and ROS
Published:
Find the facial keypoints on image with help of CNN
Published:
Detect the dog bread by using CNN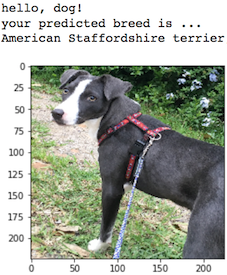
Published:
Use RNN (LSTM) to generate TV scripts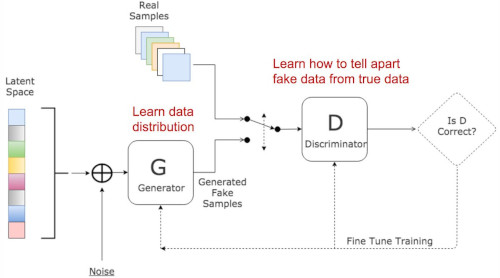
Published:
Build the path from point A to point B avoiding static obsticles in ROS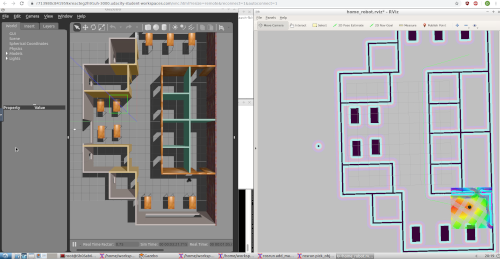
Published:
Generate unexisting portatraits with GANs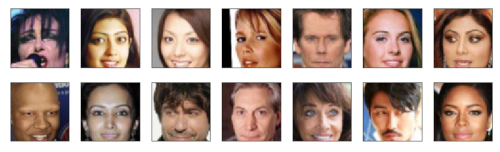
Published:
Generate the map of the environment by reading odometry, lidar and camera data